AI Position Feedback to Robot*
Students: Dawson Clevenger, Garret Donahue, Hadyn Brown
Advisor: Dr. Reza Abrisham Baf
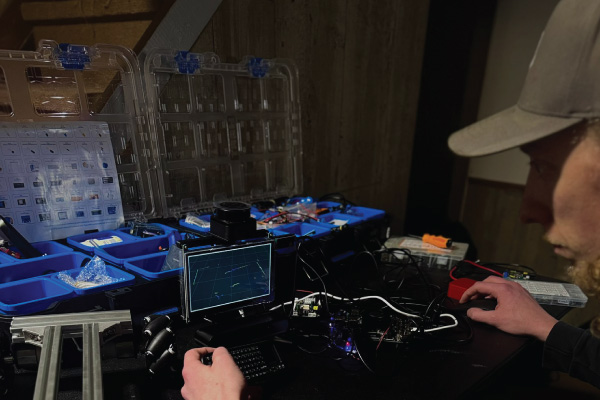
The primary objective of this project is to create a system that can identify a bearing blank’s location and orientation within a designated work envelope, convert this information into usable robot coordinates, and command the UR5 robot to retrieve the blank with high accuracy. The system includes an OAK-4 S smart camera capable of onboard inference, a YOLOv11 machine-learning model trained using images labeled in Roboflow, and a pneumatic magnetic-cylinder gripper system controlled by the robot’s I/O.
*Sponsor: Miba Bearings US, LLC
Autonomous Mobile Service Robot
Students: Jeff Selvey, Elijah Wolf, and John Shininger
Advisor: Dr. Reza Abrisham Baf
The goal of this project is to design, build, and program an autonomous mobile service robot capable of reliable indoor navigation and user interaction. The robot integrates mechanical, electrical, and software subsystems into a unified platform using holonomic mecanum-wheel motion, LIDAR-based SLAM, and AI-enhanced perception. Key objectives include achieving accurate indoor mapping and obstacle avoidance, implementing object-aware behaviors through AI-powered vision, and enabling verbal command processing for intuitive human–robot interaction. Upon completion, the system will demonstrate autonomous navigation, environment awareness, and interactive task execution in indoor environments.
Autonomous Omni-Directional AGV (Automated Guided Vehicle)*
Students: Seth Burghard, Nick Delaet, Mason Powers
Advisor: Dr. Mahdi Yazdanpour
The objective of this project is to design, prototype, and demonstrate an autonomous omni-directional Automated Guided Vehicle (AGV) capable of navigating both indoor and controlled outdoor environments on a single-floor surface. The AGV will utilize a holonomic drive system using Mecanum wheels, a LiDAR sensor for Simultaneous Localization and Mapping (SLAM), and an NVIDIA Jetson Nano running the Robot Operating System (ROS) for localization, path planning, and obstacle avoidance.
*Sponsor: Armin J Fleck Fund
Bridge Crusher *

Students: Jason Jordan, Michael Romine, Caleb Shenkel
Advisor: Dr. Reza Abrisham Baf
The purpose of this project is to design and build a linear-actuated bridge crusher with accurate force, positional feedback, and sound design to teach the next generation of STEM students. This project will include advanced electrical controls, safety, and a fully functional Human-Machine Interface (HMI) for intuitive, safe device operation. Upgraded Motors and custom-machined parts will be installed along with a fully built control panel equipped with a Programmable Logic Controller (PLC). This project will be owned and utilized by Northwest State’s Engineering Department with the purpose of testing the final project for the Strengths and Materials class. This project involves students designing a popsicle stick bridge with the goal of withstanding 200lbs of controlled applied force, which our project will apply.
*Sponsor: Northwest State Community College
Electric Go-Kart*
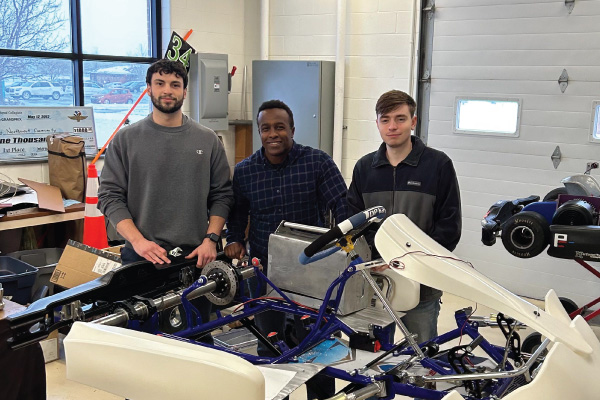
Students: Ash Walz, Jacob Romine, Joseph Kelly
Advisor: Dr. Reza Abrisham Baf
The objective of this project is to design, develop, and construct a fully electric go-kart. We are doing a split axle design with dual torque-limiting AC motors. The go-kart will be fitted with two custom battery cells to accommodate the two motors. These battery cells will be designed to conform to the standards of Purdue University’s Electric Vehicle (EV) Grand Prix competition. Our design features a split axle design, allowing each motor to operate at varying speeds. By doing so, we will gain the ability to control turning performance, as the inside motor will slow or maintain speed, while the outside motor increases speed based on the turn radius. Our goal is to enhance traction and maneuverability compared to traditional single-motor go-karts.
*Sponsor: Northwest State Community College
Hexagonal Plant Growth Pod
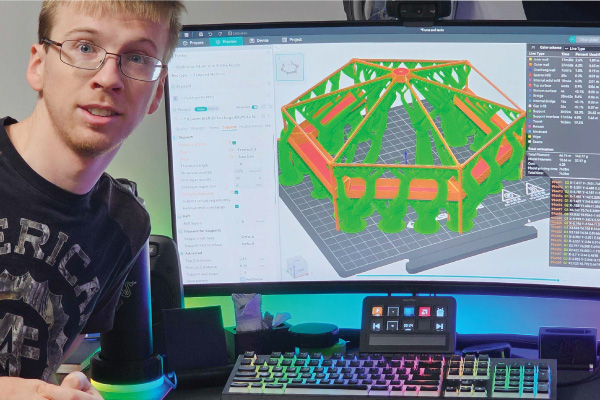
Students: Shawn Carpenter, Dean Moran, and Henley Sagle
Advisor: Dr. Reza Abrisham Baf
The objective of this project is to create a 3D printed model of an innovative hexagonal plant growth pod. Because creating this product at a life size scale would go far beyond cost and time, we have decided to demonstrate the pod in miniature form. Along with this 3D printed model, we will have scaled up calculations for the projects design providing support to the claim that all component selections made are appropriate for the system. These pod components would include a growing light, water pump, solar panel, temperature control, water level control, and humidity control.
Houseplant Growing System

Students: Christopher Larry, Scott Zimmer
Advisor: Dr. Reza Abrisham Baf
The objective of this project is to create a self-monitoring plant system that will be a cost-effective way for any person to enjoy the benefits of houseplants no matter their level of horticultural knowledge. The project requires the application of programming, structural design, and electrical distribution for a product that is not only size-conscious but also requires very little user input. Solar power and AI integration for future iterations was also considered in the design.
Automated Conveyor and Vacuum Clean-Off System *

Students: Adam Nalley, Brayden Wiggins, and Jonathon Nelson
Advisor: Prof. Rob Speckert
This project encompasses the design and implementation of an automated conveyor and vacuum clean-off system. The system will be installed beneath a carding line to continuously capture and remove nonwoven lint, fly, and trim. By automating debris removal, the system reduces manual housekeeping requirements, enhances workplace safety by mitigating combustible dust accumulation, and minimizes production downtime while supporting consistent product quality. Project management has been led by Brayden Wiggins, who has ensured milestones and deadlines are met. Jon Nelson is responsible for system design using AutoCAD Inventor, while Adam Nalley has overseen the procurement and staging of all required components in preparation for installation.
*Sponsor: Edgewell Personal Care
Automotive Braking Simulator*
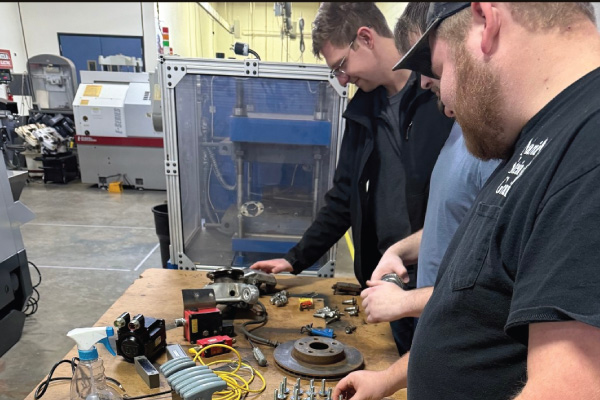
Students: Brad Schmiesing, Jared Shellabarger, Philip Blaess
Advisor: Prof. Rob Speckert
This project involves the design and development of an automotive braking simulator that replicates key functional characteristics of a vehicle braking system. It measures and records braking parameters to enable direct comparison of different brake pad materials under consistent, controlled operating conditions. By isolating variables such as applied pressure, torque, and rotational speed, the system provides a clear, repeatable method for evaluating braking performance. A primary objective of the project is educational use. The braking simulator is intended as a classroom demonstration tool that helps students visualize and understand the relationship between brake pad material, applied force, and system response. By bridging theoretical concepts with real-world automotive behavior, the simulator provides practical insight into braking mechanics and material performance.
*Sponsor: Armin J Fleck Fund
Deadspin *

Students: Jacob Miller and Kyle Honigfort
Advisor: Prof. Rob Speckert
For this project student engineers set out to design and build a 3lb battle bot to compete at a battle bot competition. This project, which was funded through the Fleck Scholarship, allowed engineering students to demonstrate their ability to use the engineering design skills they have learned through their time at Miami of Ohio Regionals and Rhodes State Community college. The bot they choose to design utilizes a beater bar weapon and is in the beetle class of battle bots (3lbs or less). This will be competed at an event hosted by Xtreamstem as part of their collegiate clash competition which brings together students from many different universities and high schools to compete.
*Sponsor: Armin J Fleck Fund